La gestión de pavimentos urbanos en Brasil sufre históricamente por la escasez de datos estructurados. Los municipios dependen de inspecciones manuales lentas y subjetivas, o de equipos costosos que hacen inviable el monitoreo continuo. Esto genera un modelo puramente reactivo, en el cual las intervenciones ocurren solo en etapas críticas de degradación, demandando reconstrucciones onerosas.
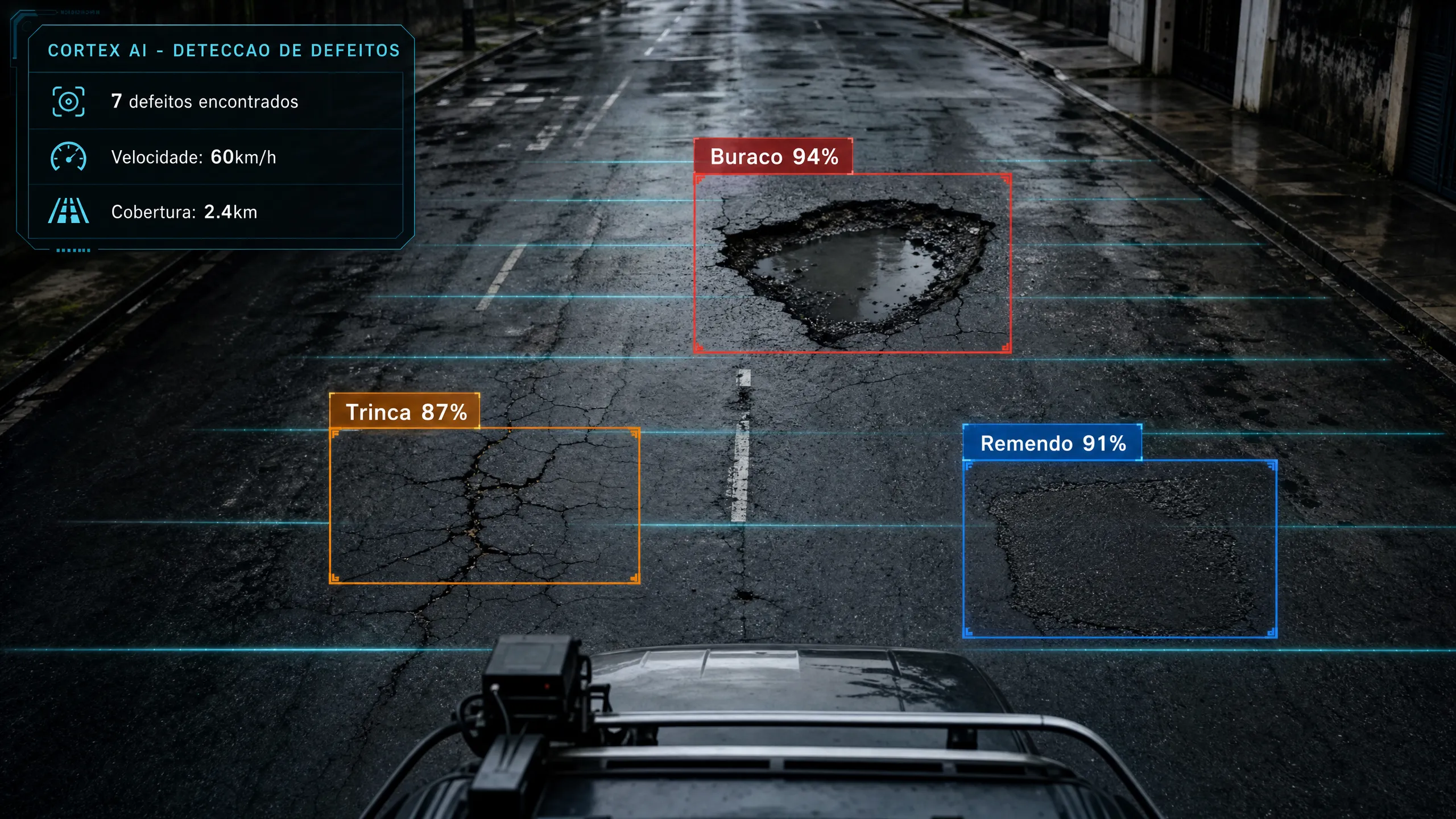
La ingeniería de visión computacional integrada a flotas de fiscalización urbana rompe ese ciclo. Al embarcar algoritmos de aprendizaje profundo (deep learning) en vehículos de fiscalización de tránsito o de estacionamiento rotativo que ya circulan diariamente, la recolección de datos alcanza un costo marginal cero. El pavimento pasa a evaluarse de forma continua, objetiva y georreferenciada, alimentando Sistemas de Gestión de Pavimentos (SGP).
1. Ingeniería de Visión Computacional en el Pavimento: Sensores, Modelos y Procesamiento
La detección automatizada de patologías asfálticas exige una arquitectura de hardware y software diseñada para las condiciones extremas del entorno urbano brasileño. A diferencia de las pruebas controladas en laboratorio, los vehículos de fiscalización enfrentan variaciones abruptas de luminosidad, sombras de árboles y edificios, trepidación constante y oclusiones causadas por el tráfico intenso.
Arquitectura de Hardware y Posicionamiento de los Sensores
Para garantizar la captación de imágenes con resolución y ángulo adecuados para el análisis de grietas milimétricas, Areatec utiliza cámaras de alta velocidad (global shutter) con resolución mínima de 4K (3840x2160 píxeles) y lentes con distancia focal calibrada para minimizar distorsiones ópticas en los bordes del cuadro. Las cámaras comunes con obturador electrónico del tipo rolling shutter sufren el efecto de distorsión de movimiento (motion blur) cuando el vehículo se desplaza a velocidades urbanas normales (entre 40 y 60 km/h). El uso de sensores global shutter garantiza que todos los píxeles del sensor sean expuestos simultáneamente, capturando imágenes nítidas incluso bajo fuerte trepidación.
Las cámaras se montan en soportes antivibración (gimbals electromecánicos con amortiguación pasiva por elastómeros) instalados en el techo o en la parte frontal del vehículo. El ángulo de inclinación del eje óptico se fija entre 30 y 45 grados respecto al plano horizontal de la vía. Esta geometría de captura permite cubrir un carril de rodamiento completo (aproximadamente 3,5 metros de ancho) manteniendo una resolución espacial de hasta 1,5 milímetros por píxel en el área de interés inmediato (entre 3 y 8 metros por delante del vehículo).
La iluminación se estabiliza mediante algoritmos de compensación dinámica de exposición basados en regiones de interés (ROI) de Aretron, mitigando las sombras de árboles y edificios. En condiciones nocturnas, iluminadores infrarrojos pulsados sincronizados con el obturador garantizan un contraste constante sin perturbar la visión de los conductores en la vía.
Modelos de Deep Learning: Detección y Segmentación Semántica
El procesamiento de las imágenes estructuradas ocurre en dos etapas consecutivas en la arquitectura de inteligencia artificial de Aretron:
- Detección de Objetos con YOLOv8 y YOLOv11 Adaptados: Para defectos discretos y localizados, como baches (cavidades) y parches, se aplican redes neuronales convolucionales de la familia YOLO (You Only Look Once), optimizadas con capas de atención espacial (Squeeze-and-Excitation o Convolutional Block Attention Module - CBAM). Estas capas dirigen el foco de la red hacia texturas de alta frecuencia típicas de fallas estructurales, ignorando el ruido visual de hojas secas, suciedad o sombras en la pista.
- Segmentación Semántica con U-Net y FCN: Para manifestaciones patológicas lineales o ramificadas, como grietas longitudinales, transversales y piel de cocodrilo, la detección por cajas delimitadoras (bounding boxes) es insuficiente para calcular el área afectada o la extensión del daño. En esos casos, el sistema emplea redes de segmentación semántica basadas en arquitecturas U-Net o redes totalmente convolucionales (Fully Convolutional Networks - FCN) con codificadores ResNet-50 preentrenados. La segmentación clasifica cada píxel de la imagen individualmente, permitiendo la extracción exacta de la geometría de la grieta, su ancho medio y su densidad por metro cuadrado.
La pérdida de clases desbalanceadas se trata a través de la función de pérdida Focal Loss. Como el pavimento íntegro representa más del 95% de los píxeles capturados en una ruta típica, las funciones de pérdida tradicionales tienden a ignorar las patologías. La Focal Loss ajusta el peso de las actualizaciones de los gradientes durante el entrenamiento, enfocándose en los ejemplos difíciles (las patologías viales) y minimizando la influencia de las áreas sin defectos. Para garantizar robustez frente a la realidad nacional, Aretron fue entrenado con más de 10 millones de imágenes de vías brasileñas, cubriendo variaciones climáticas tropicales, parches irregulares de concesionarias y diferentes tipos de agregados asfálticos.
Georreferenciación de Alta Precisión y Fusión de Sensores
Cada defecto identificado por Aretron necesita localizarse en el espacio físico con precisión suficiente para guiar a los equipos de mantenimiento. El vehículo de fiscalización integra un receptor GNSS multifrecuencia con soporte para correcciones RTK (Real-Time Kinematic) y una Unidad de Medición Inercial (IMU) de nivel industrial.
La fusión de sensores ocurre por medio de un Filtro de Kalman Extendido (EKF). Cuando el vehículo pasa bajo viaductos, túneles o "cañones urbanos" formados por edificios altos, donde la señal de GPS sufre degradación o pérdida total (multipath), la IMU asume el cálculo de odometría y actitud del vehículo. Al recuperar la señal GNSS, el sistema corrige las derivas acumuladas. Esta disposición garantiza que cada coordenada de defecto registrada presente un error posicional inferior a 0,5 metros, permitiendo la superposición perfecta de los datos en mapas digitales y sistemas de información geográfica (GIS).
2. Estandarización Nacional: Normas del DNIT y Clasificación de Defectos
La validación de un sistema de visión computacional para la administración pública brasileña requiere la adherencia estricta a las normas técnicas vigentes. En el ámbito federal, el Departamento Nacional de Infraestructura de Transportes (DNIT) establece los criterios de terminología, levantamiento y evaluación de pavimentos flexibles. Aretron fue calibrado para traducir las salidas de los modelos de deep learning directamente a los parámetros normativos nacionales.
Norma DNIT 005/2003 - TER: Terminología de Defectos
La norma DNIT 005/2003 - TER [1] estandariza la identificación visual de fallas en pavimentos flexibles y semirrígidos. El sistema de Areatec clasifica y codifica las siguientes ocurrencias:
- Grieta Aislada (T): Fisuras individuales divididas en Longitudinales (TL), paralelas al eje de la vía (fatiga o fallas de junta), y Transversales (TT), perpendiculares al eje (retracción térmica o propagación de grietas subyacentes).
- Grieta Interconectada (FC): Fisuras que se cruzan, divididas en Clase 2 (FC-2) ("piel de cocodrilo" sin erosión en los bordes, indicando fatiga del revestimiento) y Clase 3 (FC-3) (con erosión en los bordes o desagregación de bloques, indicando falla estructural).
- Hundimiento (A): Deformaciones permanentes, divididas en Hundimiento por Huella de Rueda (ATR), a lo largo de la trayectoria de los neumáticos por tráfico pesado, y Hundimiento Localizado (AL), por asentamientos del subsuelo.
- Ondulación o Corrugación (O): Deformaciones plásticas transversales con crestas y valles, comunes en zonas de frenado o aceleración intensa (paradas de autobús).
- Exudación (EX): Migración del ligante asfáltico hacia la superficie, generando una película resbaladiza que reduce la adherencia.
- Desgaste (D) o Desagregación: Pérdida progresiva del agregado de la superficie del pavimento, generando textura áspera y desprendimiento de placas.
- Bache (P): Cavidades que se forman en el revestimiento penetrando en las capas de base, por acción del tráfico pesado y el agua.
- Parche (R): Correcciones de defectos anteriores, divididas en Superficial (RS) (sustitución del revestimiento) y Profundo (RP) (reconstrucción de base y sub-base).
Norma DNIT 006/2003 - PRO y DNIT 008/2003 - PRO: Levantamientos Visuales
El DNIT define dos métodos principales de evaluación de campo. La norma DNIT 008/2003 - PRO [2] trata del Levantamiento Visual Continuo (LVC), una inspección expedita realizada por un anotador a bordo de un vehículo a baja velocidad. Este método, aunque rápido, es altamente subjetivo, inconsistente entre operadores y peligroso, pues expone al equipo al tráfico urbano.
La norma DNIT 006/2003 - PRO [3] establece el Levantamiento Visual Detallado (LVD), realizado a pie en segmentos de muestra de 20 metros cada 200 metros (muestreo sistemático del 10%). El LVD es extremadamente lento y costoso, haciendo inviable su aplicación frecuente en toda la malla urbana.
El Aretron de Areatec resuelve este cuello de botella técnico al realizar un levantamiento con la cobertura total (100% de la vía) típica del LVC, pero con la precisión geométrica y objetividad superiores al LVD, operando a la velocidad normal del tráfico urbano (hasta 60 km/h). El error humano y la subjetividad del evaluador son eliminados.
3. Estandarización Internacional: ASTM D6433, PASER y SHRP-LTPP
Para municipios que utilizan plataformas de gestión de pavimentos de estándar internacional o buscan financiamientos de organismos multilaterales como el Banco Mundial o el BID, Aretron realiza la clasificación de patologías según las normas norteamericanas.
ASTM D6433: El Pavement Condition Index (PCI)
La norma ASTM D6433 [4] rige el cálculo del Pavement Condition Index (PCI), índice numérico de 0 a 100 que califica el estado de pavimentos y estacionamientos. El cálculo exige el levantamiento de 19 tipos de defectos asfálticos en tres niveles de severidad (Baja, Media y Alta).
Escala PASER (Pavement Surface Evaluation and Rating)
Desarrollada por la Universidad de Wisconsin-Madison [5], la escala PASER simplifica la gestión vial al clasificar el pavimento en una nota de 1 a 10. Aretron convierte los datos de severidad y densidad de grietas para generar el índice PASER de cada segmento de cuadra de forma instantánea:
- Notas 9 y 10 (Excelente): Pavimento nuevo o recién recapeado. Exige solo mantenimiento de rutina.
- Notas 7 y 8 (Bueno): Primeros signos de desgaste o grietas capilares. Indicado para sellado de grietas (crack sealing).
- Notas 5 y 6 (Regular): Grietas moderadas y desagregación inicial. Exige tratamientos preventivos como microrrevestimiento asfáltico en frío.
- Notas 3 y 4 (Malo): Grietas severas, baches aislados y hundimientos. Exige fresado y recapeo (overlay) o parches profundos.
- Notas 1 y 2 (Pésimo): Falla estructural completa. Exige reconstrucción total de la estructura del pavimento.
SHRP-LTPP (Strategic Highway Research Program)
El manual de identificación de defectos del LTPP (Long-Term Pavement Performance) [6] sirve como diccionario visual calibrador de severidades. Aretron usa las definiciones del LTPP para clasificar grietas longitudinales: severidad baja si el ancho es menor que 6 mm; media si está entre 6 y 19 mm; y alta si es mayor que 19 mm.
4. Correlación y Equivalencia de Patologías: DNIT vs. ASTM
Para garantizar la interoperabilidad de datos, Aretron implementa una matriz de equivalencia de ingeniería entre los estándares del DNIT y de la ASTM, correlacionando patologías y métricas de visión computacional:
| Defecto | DNIT 005/2003-TER | ASTM D6433 (PCI) | Métricas por Visión Computacional |
|---|---|---|---|
| Fatiga | Grieta Interconectada FC-2/FC-3 | Alligator Cracking | Área ($m^2$), densidad ($m/m^2$), abertura ($mm$) |
| Fisuras | Grieta Aislada TL/TT | Longitudinal/Transverse | Extensión ($m$), azimut, abertura ($mm$) |
| Exudación | Exudación (EX) | Bleeding | Área ($m^2$), reflectividad de superficie |
| Hundimiento Rueda | Hundimiento ATR | Rutting | Extensión ($m$), profundidad ($mm$), desvío inercial |
| Hundimiento Local | Hundimiento AL | Depression | Área ($m^2$), volumen ($m^3$), aceleración vertical |
| Bache | Bache (P) | Pothole | Área ($m^2$), volumen ($m^3$), profundidad ($mm$) |
| Parche | Parche RS/RP | Patching | Área ($m^2$), planicidad relativa |
| Desgaste | Desgaste (D) | Raveling / Weathering | Pérdida de agregado ($m^2$), microtextura |
5. Integración con Sistemas de Gestión de Pavimentos (SGP)
Recolectar datos visuales con inteligencia artificial es solo la mitad del camino. El verdadero valor para la ingeniería de obras y para el gestor público surge cuando esos datos alimentan de forma automatizada las herramientas de toma de decisiones y planificación presupuestaria.
Alimentación de Software de Ingeniería: HDM-4 y MicroPAVER
Aretron se integra directamente a software como el HDM-4 [7] (estándar del Banco Mundial para análisis de inversiones y deterioro temporal de pavimentos) y el MicroPAVER (desarrollado por el USACE para gestión urbana basada en el PCI). A través de APIs, el sistema exporta los datos estructurados (JSON, .xml o .csv) que contienen la matriz completa de defectos por segmento, automatizando el flujo de toma de decisiones.
Cálculo de Índices de Calidad: IGG, PCI e IRI
Con los datos de visión computacional ingresados, el SGP calcula de forma instantánea los tres principales índices de calidad del pavimento:
- Índice de Gravedad Global (IGG): Media ponderada de las frecuencias de defectos por tramo (norma DNIT 006/2003-PRO), clasificando las vías de Óptimo (0-20) a Pésimo (por encima de 160).
- Pavement Condition Index (PCI): Basado en la densidad y severidad de los 19 defectos de la ASTM D6433, variando de 100 (perfecto) a 0 (destruido).
- International Roughness Index (IRI): Mide la irregularidad longitudinal (m/km) [8]. Aretron estima el IRI correlacionando defectos superficiales con lecturas de aceleración vertical de la IMU.
Estimación Inercial del IRI
La estimación indirecta del IRI a partir de sensores inerciales embarcados se basa en el modelo matemático del "Cuarto de Coche" (Golden Car), definido por la norma ASTM E1170. Aretron procesa las aceleraciones verticales medidas por la IMU en tiempo real, aplicando un filtro pasa-altas Butterworth de segundo orden para eliminar derivas de baja frecuencia. La integración temporal doble proporciona el desplazamiento vertical relativo de la masa suspendida. Al correlacionar esos desplazamientos con la velocidad del vehículo (vía bus CAN-bus), el algoritmo calcula la tasa de variación acumulada por kilómetro, entregando el IRI estimado en m/km con coeficiente de determinación ($R^2$) superior a 0,88 respecto a perfilómetros láser de clase 1.
Presupuestación Automática de Obras y Cálculo de Insumos
La transformación de datos visuales en planillas de costos de ingeniería ocurre de forma automatizada en Aretron. Al integrar los datos geométricos de las patologías viales con tablas de composiciones de precios unitarios locales (como SINAPI o SICRO/DNIT), el sistema calcula los volúmenes de insumos necesarios para la recuperación de la vía.
Para servicios de bacheo, el volumen de Concreto Bituminoso Mezclado en Caliente (CBUQ) se calcula con base en el área segmentada ($A$) y en la profundidad media estimada por la severidad ($p$), aplicando el factor de esponjamiento del material ($f_{emp} \approx 1,25$) y la densidad aparente ($\rho_{asf} \approx 2,4 \text{ t/m}^3$):
$$V_{CBUQ} = \sum (A_i \times p_i) \times f_{emp}$$
Para tratamientos superficiales (como microrrevestimiento asfáltico), el sistema proyecta el área total del segmento multiplicando la longitud del tramo degradado por el ancho estándar del carril de rodamiento ($3,5 \text{ m}$), estimando el consumo de emulsión asfáltica modificada por polímero a una tasa media de $1,2 \text{ kg/m}^2$. El sistema genera informes completos con códigos SINAPI y presupuestos estimados, acelerando la planificación de licitaciones.
6. Severidad de los Defectos y Estrategia de Mantenimiento
La ingeniería de pavimentos se basa en el principio de que el costo de intervención crece exponencialmente a medida que el pavimento se deteriora. Una estrategia eficiente prioriza acciones preventivas antes de que la estructura de base se vea comprometida.
Niveles de Severidad (Baja, Media, Alta)
Aretron clasifica cada patología en tres niveles de severidad con base en parámetros geométricos rígidos extraídos por la visión computacional:
- Severidad Baja: Grietas finas (< 6 mm) sin pérdida de material ni erosión. Hundimientos < 10 mm. El revestimiento comienza a sufrir fatiga u oxidación, pero la estructura de soporte continúa íntegra.
- Severidad Media: Grietas moderadas (6 a 19 mm) con desagregación inicial de bordes. Hundimientos entre 10 y 25 mm. Piel de cocodrilo sin desprendimiento de bloques. Indica comprometimiento del revestimiento, permitiendo infiltración.
- Severidad Alta: Grietas anchas (> 19 mm) con fuerte erosión. Piel de cocodrilo con bloques sueltos. Hundimientos > 25 mm y baches profundos. Indica colapso estructural local o generalizado de base o subsuelo.
Matriz de Decisión: Preventiva vs. Correctiva vs. Reconstructiva
La clasificación de severidad y densidad alimenta una matriz de decisión técnica que define el tipo de intervención ideal para cada tramo vial, buscando maximizar el retorno de la inversión pública:
- Mantenimiento Preventivo: Aplicado en pavimentos con PCI elevado (70 a 100) y defectos de severidad baja. Las acciones incluyen el sellado de grietas aisladas, aplicación de rejuvenecimiento asfáltico o microrrevestimiento asfáltico en frío. El costo de esta intervención es extremadamente bajo (R$ 15 a R$ 30 por metro cuadrado).
- Mantenimiento Correctivo (Rehabilitación): Aplicado en pavimentos con PCI intermedio (40 a 70) y defectos de severidad media. Implica el fresado (remoción mecánica) de la capa asfáltica degradada, ejecución de parches profundos en las áreas localizadas de falla de base, y aplicación de una nueva capa de rodamiento en CBUQ. El costo es moderado (R$ 80 a R$ 150 por metro cuadrado).
- Mantenimiento Reconstructivo (Reconstrucción): Aplicado en pavimentos con PCI bajo (0 a 40) y defectos generalizados de severidad alta. Cuando la base y la sub-base pierden la capacidad de soporte debido a la infiltración prolongada de agua, la única solución técnica viable es la reconstrucción completa. El costo es altísimo (R$ 300 a R$ 600 por metro cuadrado).
Actuar preventivamente cuando el pavimento está en la transición de excelente a bueno evita que la vía alcance la etapa de reconstrucción, donde el costo de reparación es hasta veinte veces superior por metro cuadrado.
7. El Aretron de Areatec: Operación en Tiempo Real y Costo Marginal Cero
La gran barrera para la adopción de Sistemas de Gestión de Pavimentos en municipios de mediano y gran porte siempre fue el costo recurrente de adquisición de datos. Contratar inspecciones manuales o vehículos de perfilometría láser cuesta cientos de miles de reales por campaña, limitando las lecturas a intervalos de dos o tres años.
El Paradigma del Costo Marginal Cero
Areatec rompe esa barrera mediante el concepto de costo marginal cero. Como líder brasileña en tecnología para fiscalización de tránsito y estacionamiento rotativo, la empresa ya opera flotas de vehículos equipados con sistemas OCR de lectura de placas en decenas de municipios. Esos vehículos circulan continuamente por las vías urbanas, cubriendo toda la malla central y los corredores de tráfico varias veces al día.
Al embarcar el módulo de detección de defectos viales Aretron en esos mismos vehículos, la recolección de datos de ingeniería vial pasa a ocurrir de forma simultánea y transparente a la operación de fiscalización. No hay necesidad de poner autos adicionales en la calle, contratar nuevos conductores ni consumir más combustible. El costo de adquisición del dato de pavimento se vuelve virtualmente cero.
Procesamiento de Datos Híbrido: Edge Computing y Nube
El sistema opera en un modelo híbrido optimizado:
- Procesamiento en el Borde (Edge Computing): Computadoras industriales embarcadas con GPUs de alto rendimiento (NVIDIA Jetson) procesan el flujo de video 4K en tiempo real en el borde, ejecutando localmente los modelos YOLO y U-Net y evitando la transmisión de video bruto.
- Extracción de Metadatos y Protocolo DATARACE: Solo metadatos compactos (tipo, severidad, dimensiones, coordenadas GPS y recorte de la imagen) son enviados a la nube vía protocolo propietario DATARACE, que gestiona dinámicamente conexiones TCP/UDP para evitar pérdidas en zonas de sombra celular.
8. Beneficios Estratégicos para el Gestor Público y Encuadramiento Legal
La implementación de la detección de defectos viales por visión computacional entrega a los secretarios de obras, de tránsito y a los alcaldes una herramienta de gobernanza sin precedentes en el escenario nacional.
Obligaciones Legales, Nueva Ley de Licitaciones y Gemelo Digital
La gestión activa de pavimentos con Aretron atiende directamente a los principios de eficiencia y economicidad exigidos por la Constitución Federal de 1988 y sirve como un escudo jurídico bajo la égida de la Ley n.º 14.133/2021 (Nueva Ley de Licitaciones). La nueva legislación impone rigor en la planificación de contrataciones públicas, exigiendo estudios técnicos preliminares (ETP) y matrices de riesgo detalladas. El uso de datos objetivos generados por visión computacional elimina estimaciones visuales imprecisas que generan adendas contractuales y observaciones de irregularidades por Tribunales de Cuentas (TCE y TCU).
En lugar de informes estáticos en PDF, el gestor cuenta con un Gemelo Digital asfáltico actualizado continuamente. Si una concesionaria realiza un corte en la vía y ejecuta un parche de mala calidad, el sistema identifica la falla en el primer pase, permitiendo la notificación inmediata para corrección dentro de la garantía legal.
Priorización por ROI y Auditoría de Obras
Con el cálculo automatizado del IGG y PCI, la Secretaría de Obras prioriza intervenciones con base en datos de ingeniería reales, ejecutando simulaciones financieras de retorno sobre la inversión (ROI). Cada defecto registrado se acompaña de una imagen georreferenciada y autenticada con sello de tiempo (timestamp), permitiendo auditar la ejecución de servicios tercerizados:
- Auditoría de Cantidades: Validación de si el área de recapeo facturada por la contratista corresponde exactamente al área degradada identificada previamente.
- Auditoría de Eficacia: Monitoreo de la durabilidad del asfalto aplicado. Si un parche presenta fallas precoces en menos de un año, el sistema alerta a la fiscalización para exigir la rehechura sin costos para el municipio.
La detección de defectos viales con inteligencia artificial eleva la gestión urbana a un nuevo nivel de eficiencia técnica y responsabilidad fiscal, probando que la tecnología de visión computacional, cuando se aplica al mundo real, es el camino más corto hacia ciudades más seguras, inteligentes y con infraestructura de alta calidad.
Referencias
- DEPARTAMENTO NACIONAL DE INFRAESTRUTURA DE TRANSPORTES. DNIT 005/2003 - TER: Defeitos nos pavimentos flexíveis e semi-rigidos - Terminologia. Rio de Janeiro: IPR, 2003. Disponible en: https://www.gov.br/dnit/pt-br/assuntos/planejamento-e-pesquisa/ipr/coletanea-de-normas/coletanea-de-normas/terminologia-ter/dnit_005_2003_ter-1.pdf.
- DEPARTAMENTO NACIONAL DE INFRAESTRUTURA DE TRANSPORTES. DNIT 008/2003 - PRO: Levantamento visual contínuo para avaliação da superfície de pavimentos flexíveis e semi-rigidos - Procedimento. Rio de Janeiro: IPR, 2003. Disponible en: https://www.gov.br/dnit/pt-br/assuntos/planejamento-e-pesquisa/ipr/coletanea-de-normas/coletanea-de-normas/procedimento-pro/DNIT_008_2003_PRO.
- DEPARTAMENTO NACIONAL DE INFRAESTRUTURA DE TRANSPORTES. DNIT 006/2003 - PRO: Avaliação objetiva da superfície de pavimentos flexíveis e semi-rigidos - Procedimento. Rio de Janeiro: IPR, 2003. Disponible en: https://www.gov.br/dnit/pt-br/assuntos/planejamento-e-pesquisa/ipr/coletanea-de-normas/coletanea-de-normas/procedimento-pro/dnit006_2003_pro.pdf.
- AMERICAN SOCIETY FOR TESTING AND MATERIALS. ASTM D6433-20: Standard Practice for Roads and Parking Lots Pavement Condition Index Surveys. West Conshohocken: ASTM International, 2020. Disponible en: https://www.astm.org/d6433-20.html.
- UNIVERSITY OF WISCONSIN-MADISON. Pavement Surface Evaluation and Rating (PASER) Manuals. Madison: Transportation Information Center, 2013. Disponible en: https://ltap.engr.wisc.edu/documents/paser-manual-asphalt-pubpas01/.
- FEDERAL HIGHWAY ADMINISTRATION. Distress Identification Manual for the Long-Term Pavement Performance Program. 5.ª ed. Washington, D.C.: FHWA, 2013. Disponible en: https://www.fhwa.dot.gov/publications/research/infrastructure/pavements/ltpp/13092/index.cfm.
- WORLD ROAD ASSOCIATION (PIARC). Highway Development and Management (HDM-4) Version 2. Paris: PIARC, 2006. Disponible en: http://www.hdmglobal.com/hdm-4-version-2/about-hdm-4/pavement-management-systems-and-hdm-4/.
- SAYERS, M. W.; GILLESPIE, T. D.; QUEIROZ, C. A. V. The International Road Roughness Experiment: Establishing Correlation and a Calibration Standard for Measurements. Washington, D.C.: World Bank Technical Paper No. 45, 1986. Disponible en: https://en.wikipedia.org/wiki/International_roughness_index.


